
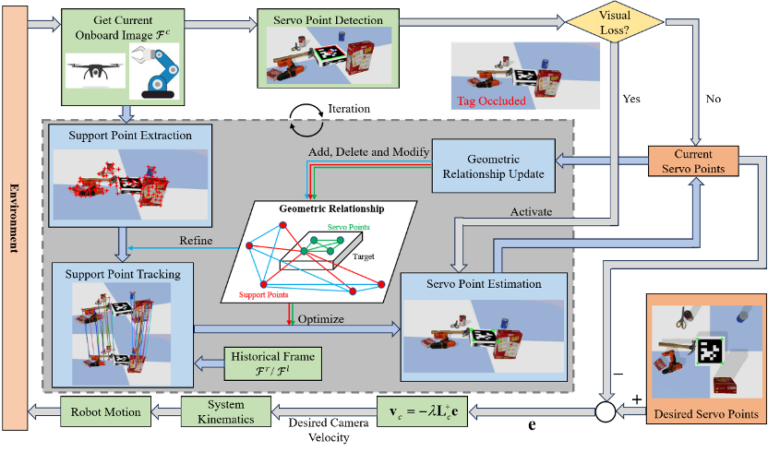
TMECH 2026: CIBVS: Continuous Image-Based Visual Servoing against Visual Signal Loss
【图/文 贺睿】基于图像的视觉伺服(Image-based visual servoing, IBVS)通过持…
Read more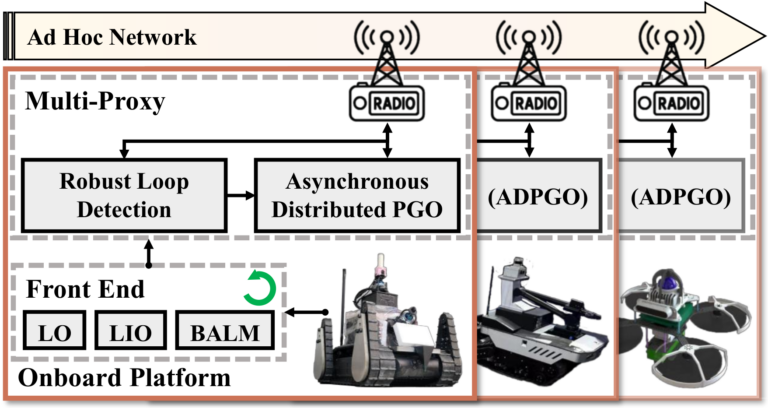
RA-L 2026: Communication-Robust Asynchronous Distributed LiDAR Collaborative Smoothing and Mapping
【图/文 王健丞】在大规模、复杂且受通信约束的环境中,高效的多机器人协作对同步定位与建图(SLAM)系统提出了…
Read more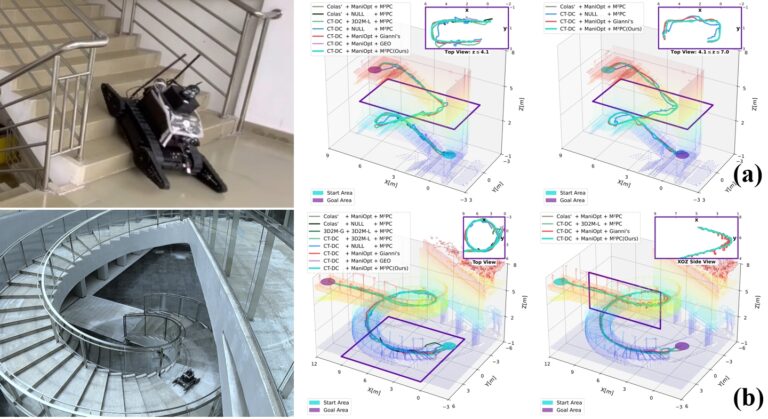
IJRR 2025: TiFA: A Terrain-informed Navigation Framework for Articulated Tracked Robots in Rescue Missions
【图/文 王逸飞】关节式履带机器人(Articulated Tracked Robots, ATRs)非常适用…
Read more
“科工巧手”团队斩获珠海国际灵巧操作挑战赛佳绩
在2025年10月29日举办的“第二届珠海国际灵巧操作挑战赛” 决赛中,由哈尔滨工业大学(深圳)与中科博特智能…
Read more
热烈祝贺实验室代表队斩获CMU Vision-Language-Autonomy挑战赛(CMU-VLA-Challenge)冠军
该比赛由美国卡内基梅隆大学发起全球性顶尖科技赛事,旨在推动具身智能在真实环境与真实机器人中的发展,探索机器人如…
Read more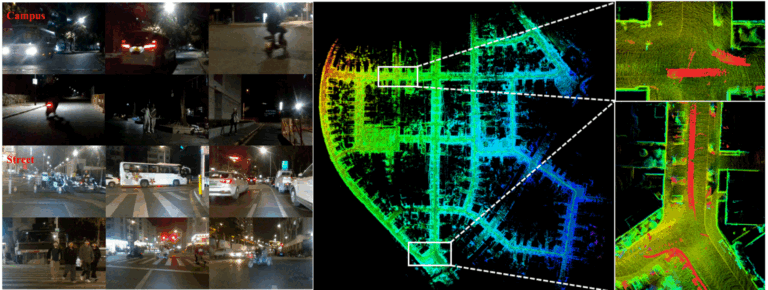
Autonomous Robots2025: DynaLOAM: Robust LiDAR Odometry and Mapping in Dynamic Environments
【图/文 王煜】本工作提出了DynaLOAM,一种面向动态环境的激光雷达SLAM框架,旨在解决动态环境下激光S…
Read more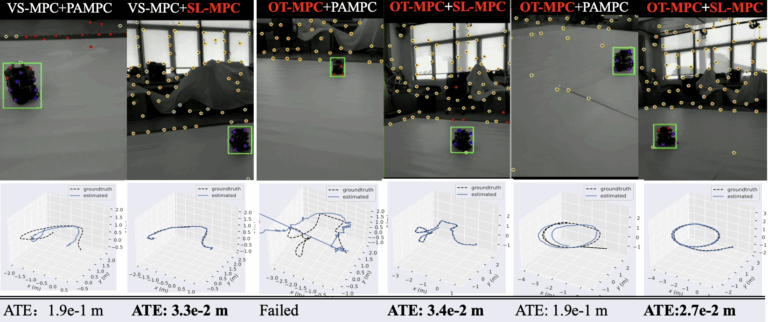
RA-L2025: SLOT-MPC: a Hierarchical Whole-body Model Predictive Controller to Enhance Localization and Object Tracking for UAVs
【图/文 华政宇】本工作提出了SLOT-MPC——一种面向多旋翼无人机系统的分层模型预测控制框架,旨在降低自身…
Read more
祝贺NROS-Lab2025届本科生陈昆同学获得哈尔滨工业大学优秀本科毕业论文
论文题目:复杂环境下异构多机器人的协同自主探索 主要的贡献点:1. 采用八叉树的地图表征框架,通过点云统计属性…
Read more
T-RO 2025: Real-Time Multi-Level Terrain-Aware Path Planning for Ground Mobile Robots in Large-Scale Rough Terrains
【图/文 李宇翔】该工作面向大范围复杂地形的地面移动机器人导航任务,设计了一种多层级地形感知路径规划框架。如图…
Read more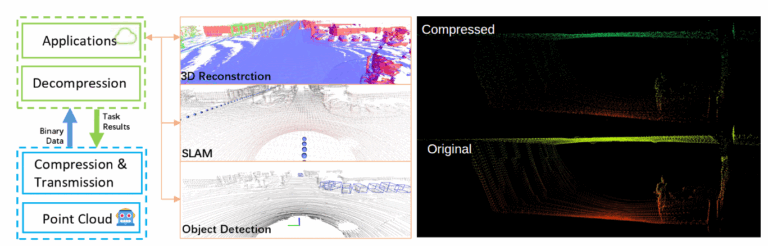
ICRA2025-Real-Time LiDAR Point Cloud Compression and Transmission for Resource-constrained Robots
【图/文 曹宇豪】激光雷达因其能够提供精确的环境结构信息而被广泛应用于自主机器人。然而,点云数据量巨大,给数据…
Read more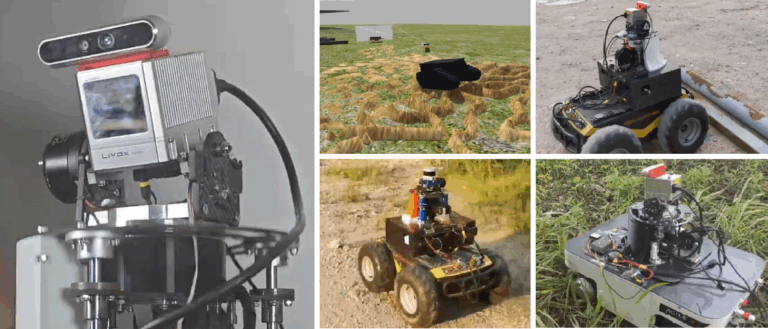
TFR2025-Terrain-Adaptive Planning of a Mobile Robot with a Multi-Axis Gimbal System for Stable SLAM
【图/文 王志濠、李鸣航】机器人或汽车在平坦地形或城市环境中的同步定位与地图构建 (SLAM) 已由成熟的解决…
Read more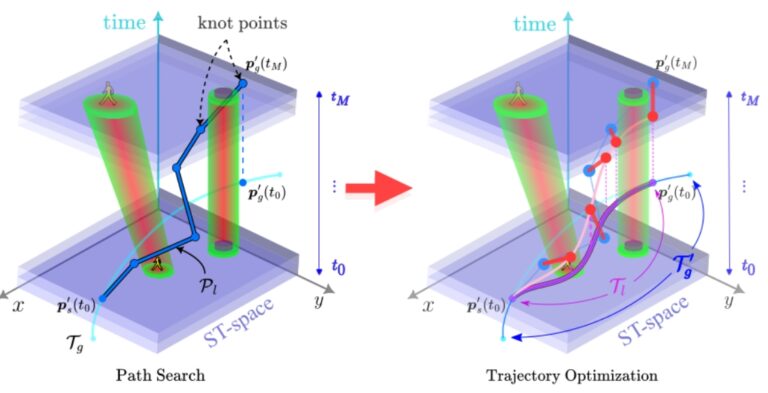
RA-L 2025: A State-Time Space Approach for Local Trajectory Replanning of an MAV in Dynamic Indoor Environments
【图/文 全凤宇】多旋翼无人机(MAV)在狭小且不断变化的室内环境中,需要可靠的规划能力以避开移动中的行人。 …
Read more
祝贺nROS代表队获得美团第二届低空经济智能飞行管理挑战赛冠军
2024年11月29日,美团第二届低空经济智能飞行管理挑战赛榜单揭晓。本次大赛在中国深圳举行,历时3个月102…
Read more祝贺实验室负责人获得深圳市优秀科技创新人才杰出青年基金项目资助
实验室负责人在智能救援机器人领域的研究基础被认可,获得深圳市优秀科技创新人才杰出青年基金项目资助…
Read moreRA-L 2024: Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
【图/文 刘培焱】 本文旨在实现OMAV在杂乱环境中的安全飞行。我们提出了一种3阶段轨迹生成框架(图1),为O…
Read more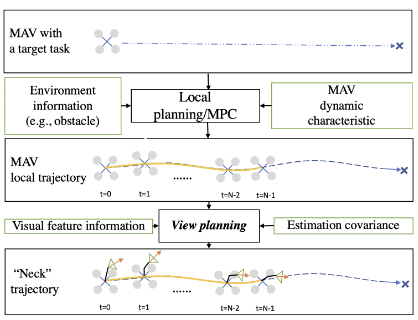
T-AES 2024: A Covariance-based View Planning Algorithm for Aerial Robots with Decoupled Vision System
【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型…
Read more祝贺NROS-Lab 2024届五位毕业生获评黑龙江省普通高等学校“优秀毕业生”或哈尔滨工业大学“优秀毕业生”
根据学校2024届黑龙江省普通高等学校优秀毕业生和哈尔滨工业大学优秀毕业生评选结果,经过激烈的角逐NROS实验…
Read more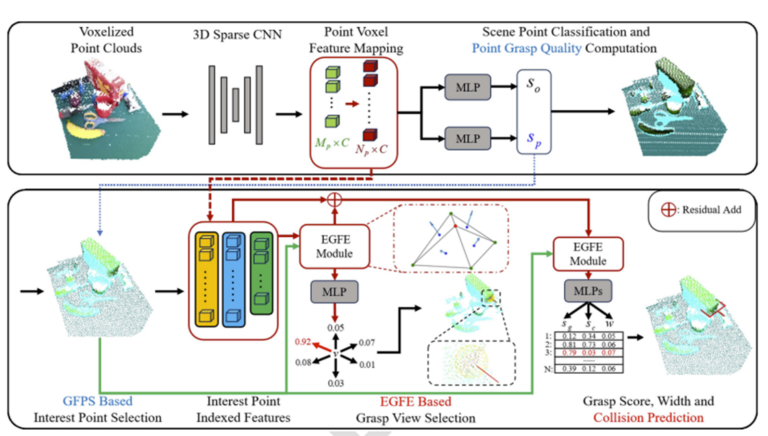
TMECH2024: Interest Point Selection and Feature Extraction in 6-DoF Grasp Pose Detection
【图/文 贺睿】 本工作面向通用机 械臂的六自由度抓取位姿检测任务,针对当前基于点云的抓取位姿检测算法中存在的…
Read more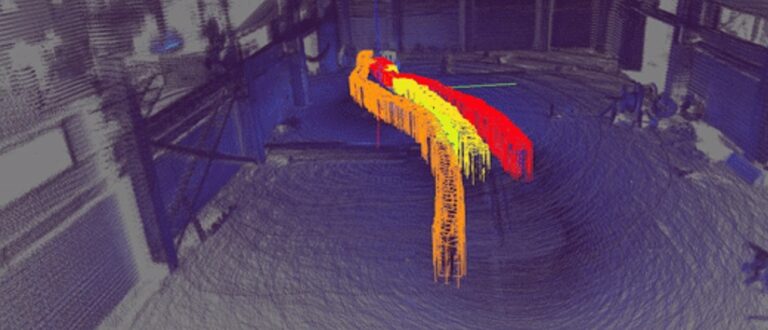
祝贺NROS-Lab2023届硕士欧阳俊源同学获得哈尔滨工业大学优秀硕士毕业论文
论文题目: 面向灾害救援机器人的实时三维目标检测。主要的贡献点: 针对点云学习模型中二次复杂度的下采样与近邻查…
Read more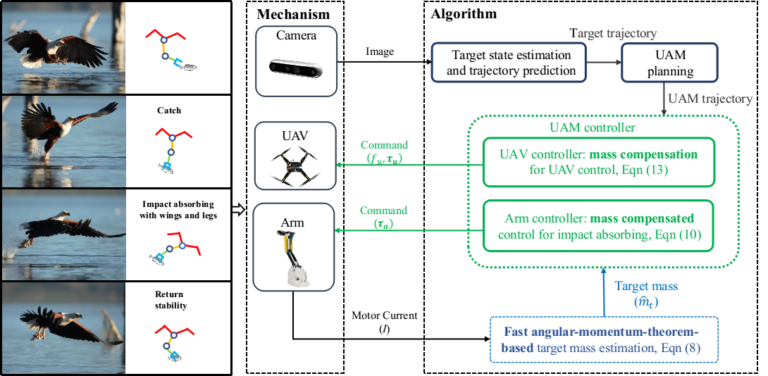
RA-L 2024: Impact Absorbing and Compensation for Heavy Object Catching with an Unmanned Aerial Manipulator
【图/文 王思强】该工作面向飞行机械臂(UAM)抓取未知质量的快速运动目标任务,设计了一种用于冲击吸收和维持飞…
Read more新闻速递-NROS-Lab 三篇论文被机器人顶会ICRA2024接收
Zhihao Wang, Shixing Huang, Minghang Li, Junyuan Ouyang…
Read more
NROS-lab队勇夺2023“自动化杯”羽毛球赛季军
【图/文 邢立 王思强】2023年12月30日,机电学院年度羽毛球赛如火如荼展开,NROS-lab实验室的小伙…
Read more
封面论文JFR 2024: Whole-Body Motion Planning and Tracking of a Mobile Robot with a Gimbal RGB-D Camera for Outdoor 3D Exploration
【图/文 王志濠】该工作面向移动机器人的快速自主重建任务,针对野外环境存在空旷、纹理分布不均且地形崎岖等严重影…
Read moreAutomatica2023: Adaptive Trajectory Tracking of UAV with a Cable-Suspended Load Using Vision-Inertial-Based Estimation
【图/文 王思强】该工作面向无人机携带悬挂载荷的负载运输需求,设计了一种结合自适应状态估计器和轨迹跟踪控制器的…
Read more
[RA-L2023] Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization
【图/文 闫栋宇、刘健恒】在该工作中,我们创新性地将神经隐式三维表达与主动重建进行了有机结合,提出了一种基于最…
Read more
祝贺实验室负责人获得哈深机电学院优秀教学教师荣誉
2023年6月10日,哈尔滨工业大学(深圳)机电工程与自动化学院2023年表彰大会于师生活动中心如期召开。 深…
Read more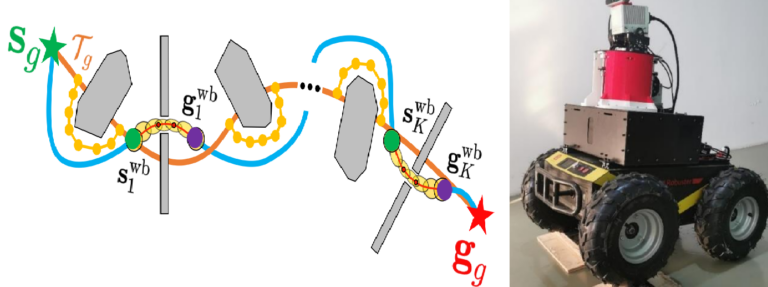
祝贺NROS-Lab2023届本科生梁思奇同学获得哈尔滨工业大学优秀本科毕业论文、李鸣航同学获得提名奖
梁思奇本科毕业论文题目: 基于激光雷达和多分辨率搜索的无人机自主避障与路径规划 贡献点: 设计了多分辨率并行路…
Read more
祝贺NROS-Lab2023届硕士刘健恒同学获得哈尔滨工业大学优秀硕士毕业生
刘健恒同学自入学以来认真学习,学习成绩优异,积极参加文体活动,保证德智体美劳的全面发展。生活中与人为善,乐于助…
Read more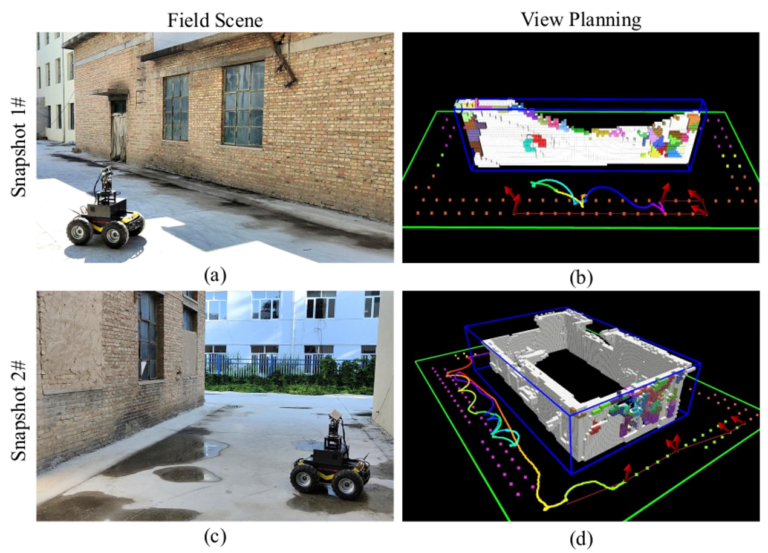
TIM2023: Object-Aware View Planning for Autonomous 3D Model Reconstruction of Buildings Using a Mobile Robot
【图/文 李宇翔】代码开源地址为:https://github.com/HITSZ-NRSL/active_m…
Read more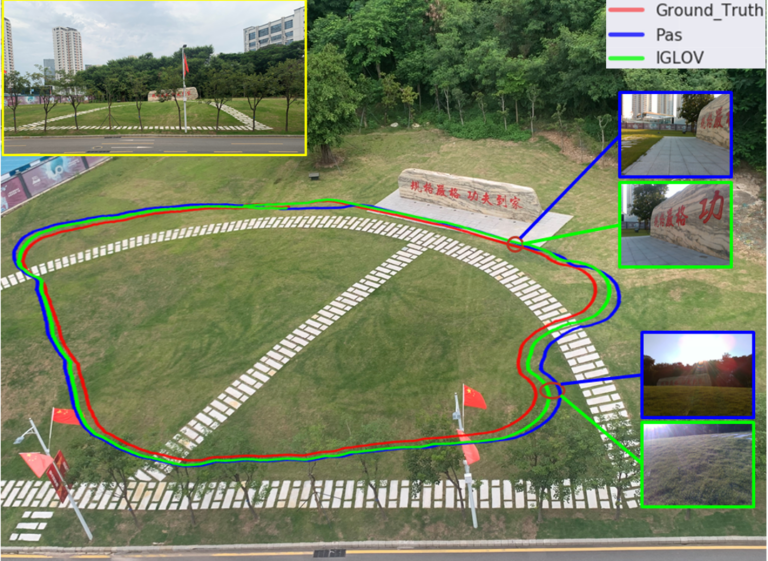
TMECH2024: Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling
【图/文 王志濠】该工作面向野外机器人作业过程中的自主定位需求,针对野外环境下地形崎岖以及纹理分布不均等严…
Read more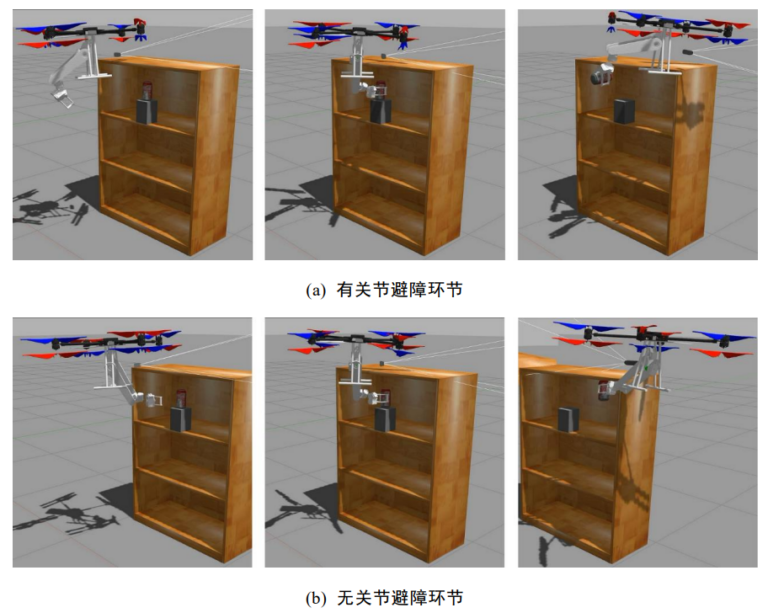
祝贺NROS-Lab2022届硕士王巨同学获得哈尔滨工业大学优秀硕士学位论文
经过激烈的竞争,NROS实验室2020级硕士(2022届毕业)王巨同学凭借其毕业论文《障碍空间下…
Read more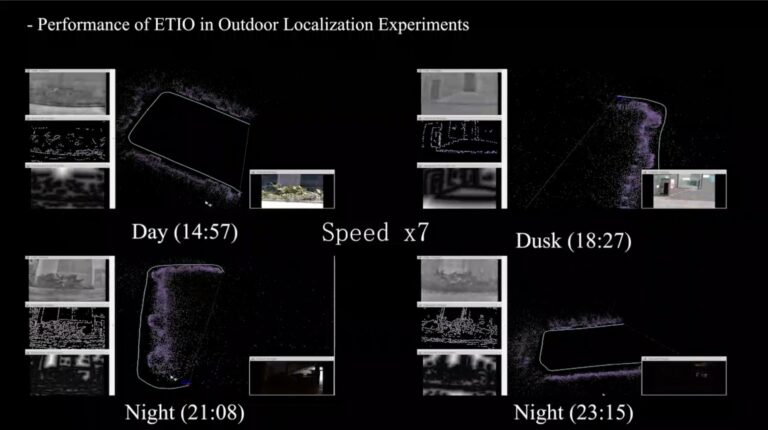
最新:NROS-Lab发表视觉退化场景下的国际上首个边缘红外惯性里程计
【图/文 王煜】针对可见光相机在灾害救援场景中容易出现的视觉退化问题,项目组提出了世界上首个基于边缘信息的红外…
Read more
赛出青春,挑战自我:祝贺NROS-lab队夺得2022“自动化杯”羽毛球赛亚军,取得新的突破
【文/图 邢立】一年一度的哈工大(深圳)自动化杯羽毛球赛,于12月10号举行。来自控制专业的选手,按照课题组分…
Read more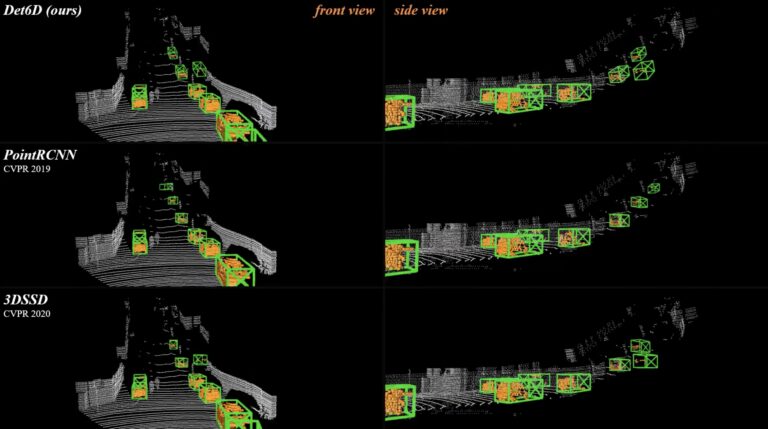
TIM2022:NROS-Lab releases the source code of Det6D, a full-degree-of-freedom 3D object detector
[图文欧阳俊源] NROSLab has recently made public its latest re…
Read more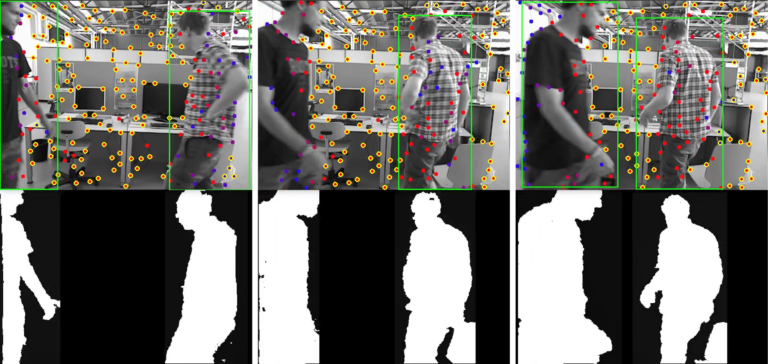
RAL2022:nROS-Lab开放视觉惯性里程计Dynamic-VINS源码
【图文 刘健恒】nROS-Lab近期开放与华为合作的最新成果Dynamic-VINS,期待感兴趣的研究与开发人…
Read more
祝贺实验室负责人获得机电学院“优秀导师”称号
实验室负责人在2022年机电工程与自动化学院教学活动中荣获“优秀导师奖”。
Read more
祝贺2022届本科生刘越千同学获得校本科优秀毕业论文
题目:过驱动六旋翼无人机的自适应模型预测控制 摘要: 在需要与环境有物理交互的场景下,过驱动无人机由于可以在…
Read more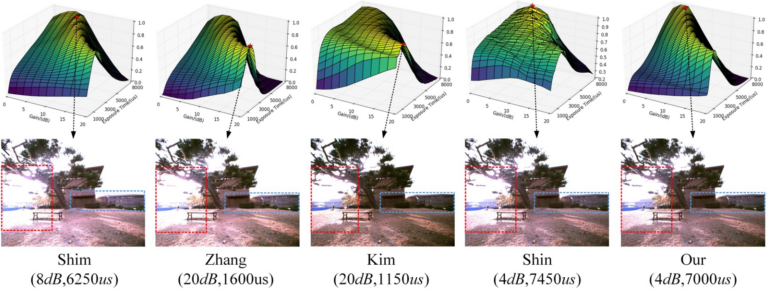
Autonomous Robots:nROS-Lab开源面向SLAM的主动曝光控制算法
【图文 王煜】Recently, our work “Automated Camera-Exposure C…
Read more祝贺nROS-Lab2021届硕士毕业生曹明同学获得哈工大优秀毕业论文、朱西同学获得哈工大优秀毕业生
经过激烈的竞争,nROS实验室2021届硕士毕业生曹明和朱西同学获得哈尔滨工业大学优秀毕业生荣誉,曹明同学还凭…
Read more
祝贺nROS-Lab与中科大智能机器人实验室联合获得国家自然科学基金区域联合创新基金资助
此次联合申请国家自然科学基金区域联合创新基金,是nROS-Lab与中国科学技术大学智能机器人实验室张世武教授团…
Read more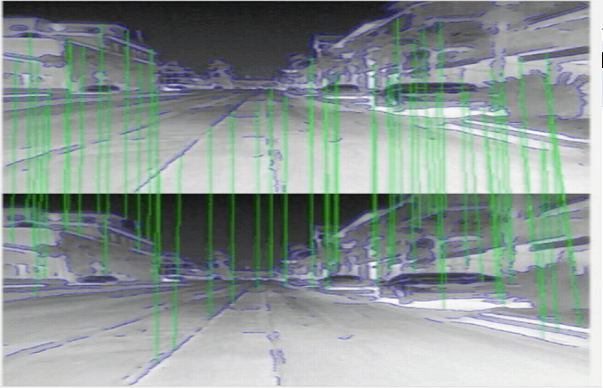
JFR 2021:EIL-SLAM: Depth-enhanced Edge-based Infrared-LiDAR SLAM
Title:EIL-SLAM: Depth-enhanced Edge-based Infrared-LiDA…
Read more
实验室负责人在哈工大(深圳)2021年教师节上接受表彰
nROS实验室负责人陈浩耀教授荣获“哈尔滨工业大学(深圳)2021届本科毕业生‘我心目中的优秀教师’”,在哈工…
Read more祝贺2021届本科生欧阳俊源、任云帆两位本科同学分别获得校优秀本科毕业论文
欧阳俊源完成了一项非常完整的无人平台数字孪生仿真系统,应甲方要求不予公开; 任云帆与另外一名nROS-Lab同…
Read more
nROS-Lab “撼地者”机器人获首届”智创杯”前沿技术挑战赛锦标赛第一名
【哈工大(深圳)宣】(粟粒粒/文、图)10月30日,首届“智创杯”前沿技术挑战赛颁奖仪式在深圳市民中心落下帷幕…
Read morenROS-Lab接受IEEE采访,展示实验室机器人成果在环境可持续发展领域的应用前景
Our planet is ready to address environmental challenges…
Read more