【图/文 王煜】针对可见光相机在灾害救援场景中容易出现的视觉退化问题,项目组提出了世界上首个基于边缘信息的红外-惯性里程计系统ETIO,实现了烟雾、黑暗等极端光线环境下的机器人鲁棒定位。
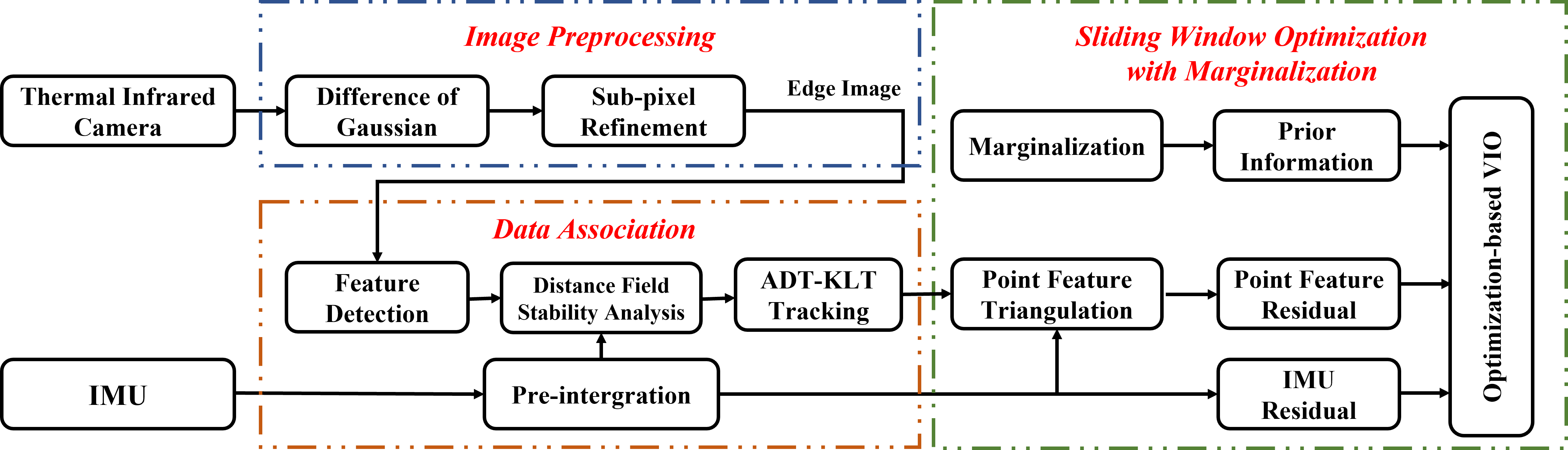
图1. ETIO系统框架
受热辐射在物体边缘变化显著的现象启发,该系统利用边缘提取的二值化图像代替原始红外图像进行数据关联,克服了热红外图像高噪声、低对比度的问题。然后,基于有限的边缘信息及其距离场,项目组提出了一种自适应特征跟踪策略ADT-KLT tracker,在边缘图像中实现了稳定的数据关联。最后,该系统利用基于滑动窗的位姿图优化方法,最小化IMU预积分误差和边缘特征观测的重投影误差,实现实时状态估计。

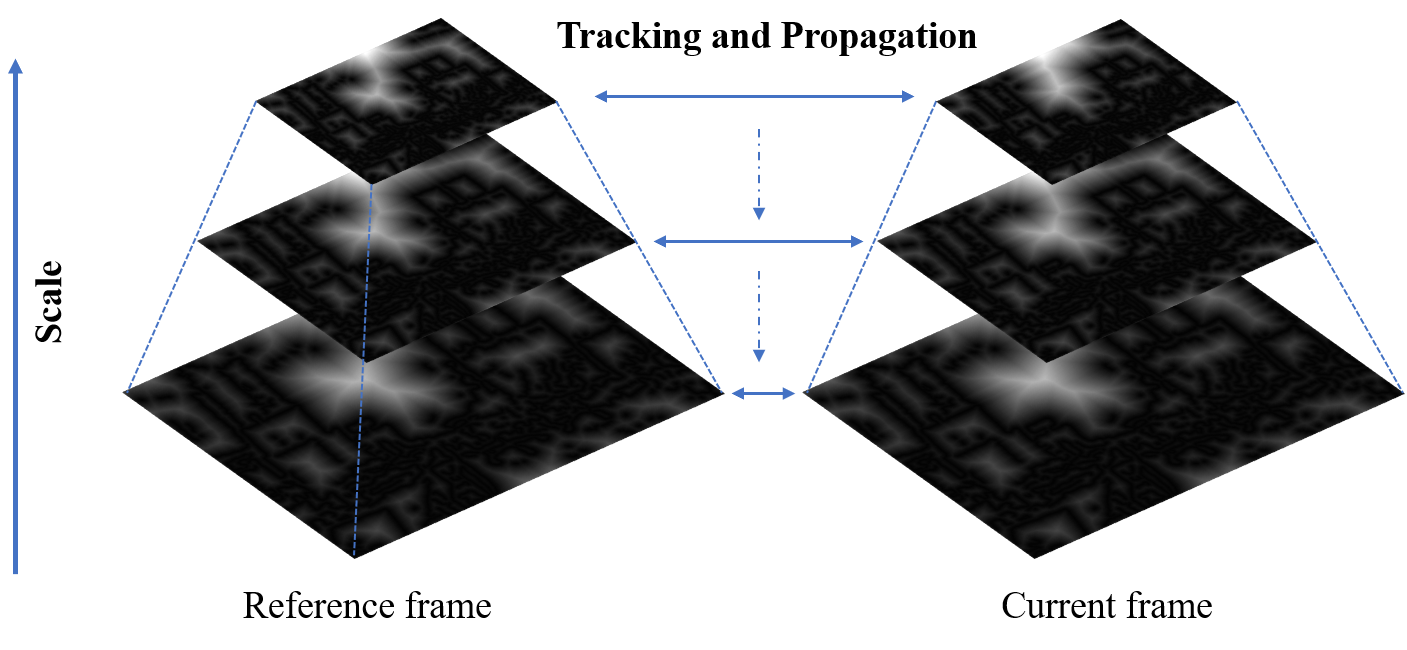
图2. 边缘图数据关联
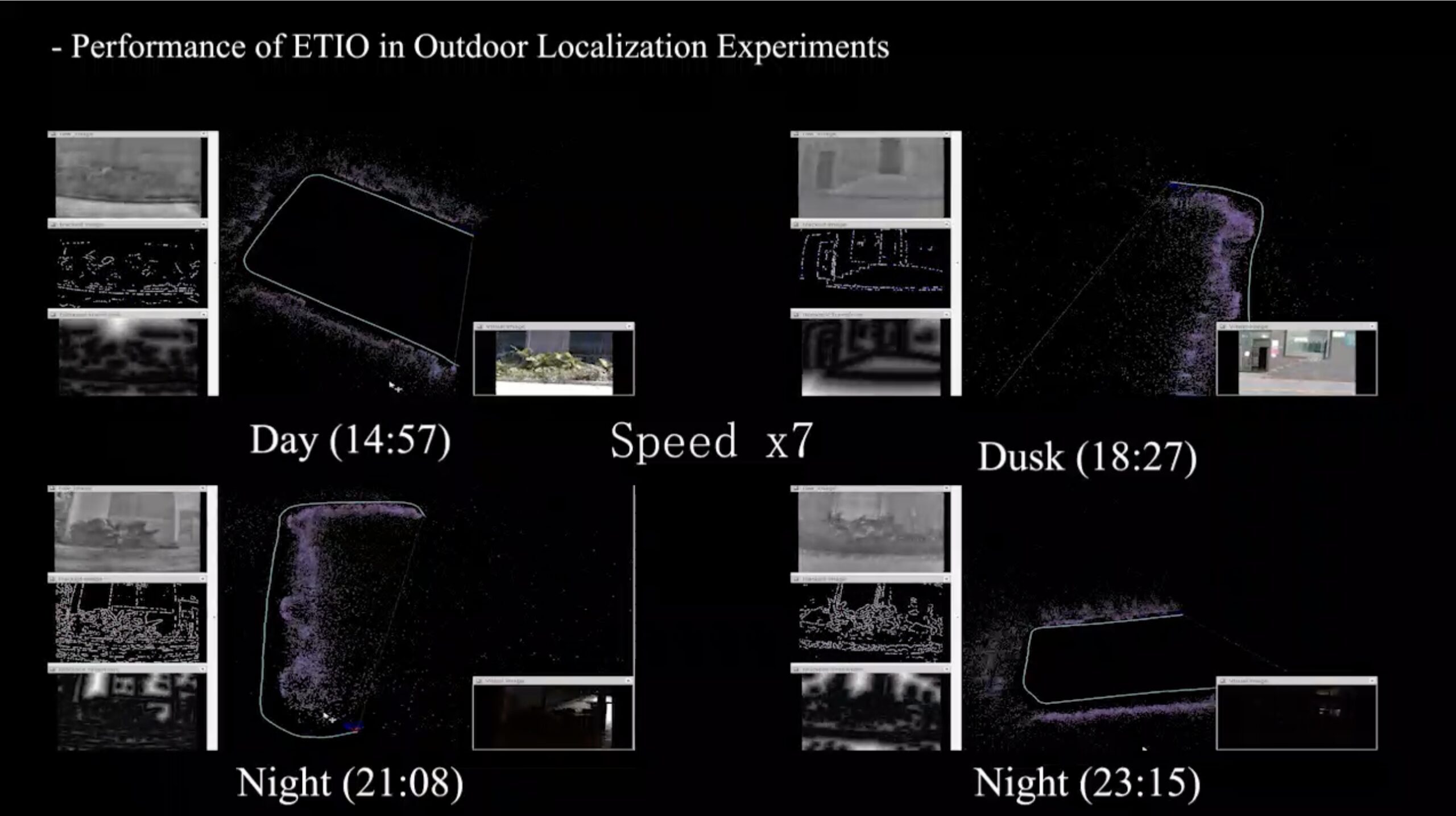
相比国际最新的方案,在黑暗、烟雾的视觉退化环境的实验中,该系统的精度提升了58.8%;在全天时户外环境实验中,该系统的平均精度提升了31.6%。实验结果证明,项目组提出的方案能够实现机器人全天时高精度定位,达到了世界领先水平。
Yu Wang(王煜), Haoyao Chen*, Yufeng Liu, Shiwu Zhang, “Edge-based Monocular Thermal-Inertial Odometry in Visually Degraded Environments“, IEEE Robotics and Automation Letters, accepted, 2023.