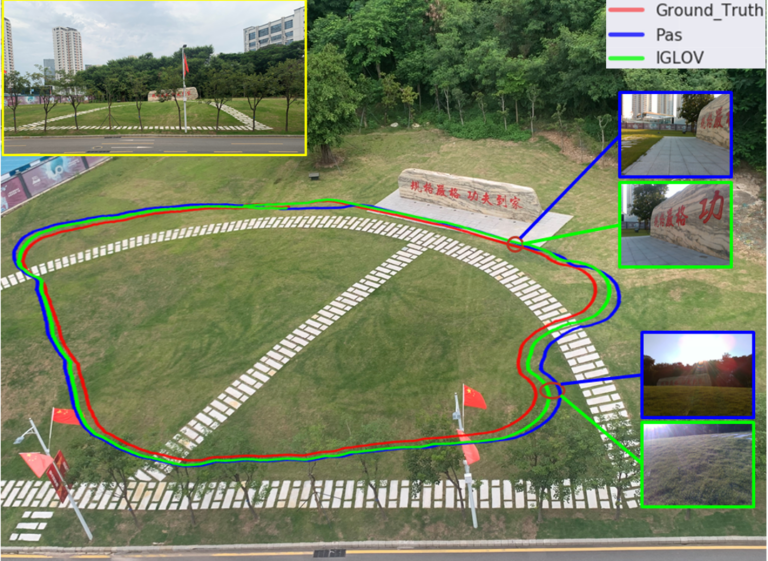
TMECH2024: Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling Posted on 2023-04-302024-03-23 【图/文 王志濠】该工作面向野外机器人作业过程中的自主定位需求,针对野外环境下地形崎岖以及纹理分布不均等严… Read more