【图/文 王志濠】该工作面向野外机器人作业过程中的自主定位需求,针对野外环境下地形崎岖以及纹理分布不均等严重影响机器人自主定位精度的问题,完成了一套主动控制相机运动以增强机器人自主视觉定位性能的方案。该方案(如图1所示)包括基于密度加权费雪信息的环境特征丰富度表征、基于多项式回归拟合的连续环境信息建模方法、基于模型预测控制的主动视角规划算法等三个部分。主要创新点:1. 提出一种新型的环境定位不确定性表征方法;2. 提出基于多项式拟合回归的连续信息建模方法,基于这种连续信息建模方法实现快速高效的视角规划方法;3. 开发了一种基于信息梯度的局部视角规划器(IGLOV),使相机能够朝向特征信息丰富的区域。规划器同时考虑了定位不确定性、避免相机朝向退化的环境探索因子、运动不确定性等约束。
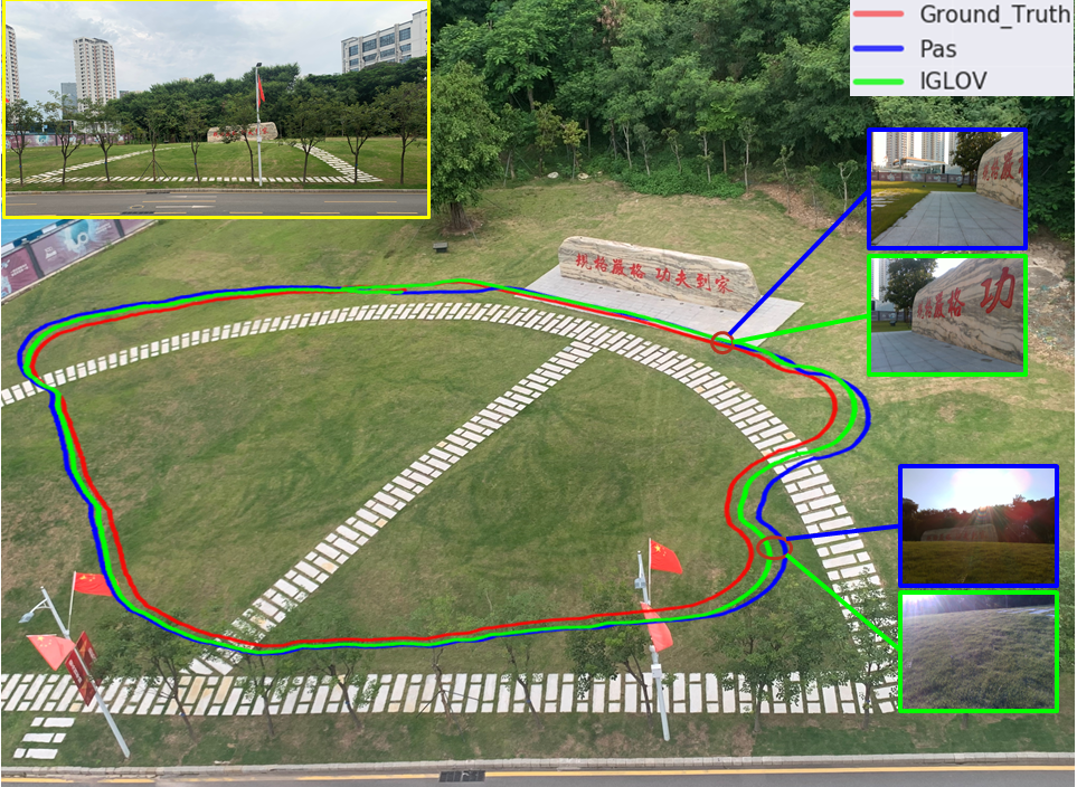
相比现有方案,该方案提高了传统环境特征丰富度表征方法的效率和精度,提供了一种高效且可行的视角规划方案,可有效解决在未知环境中传统视角规划方法的退化问题,有效地提高了在复杂野外环境下的视觉定位精度(如图2所示),对于实现户外机器人在复杂野外环境下的自主定位有重要意义。
代码开源地址为:https://github.com/HITSZ-NRSL/IGLOV.git
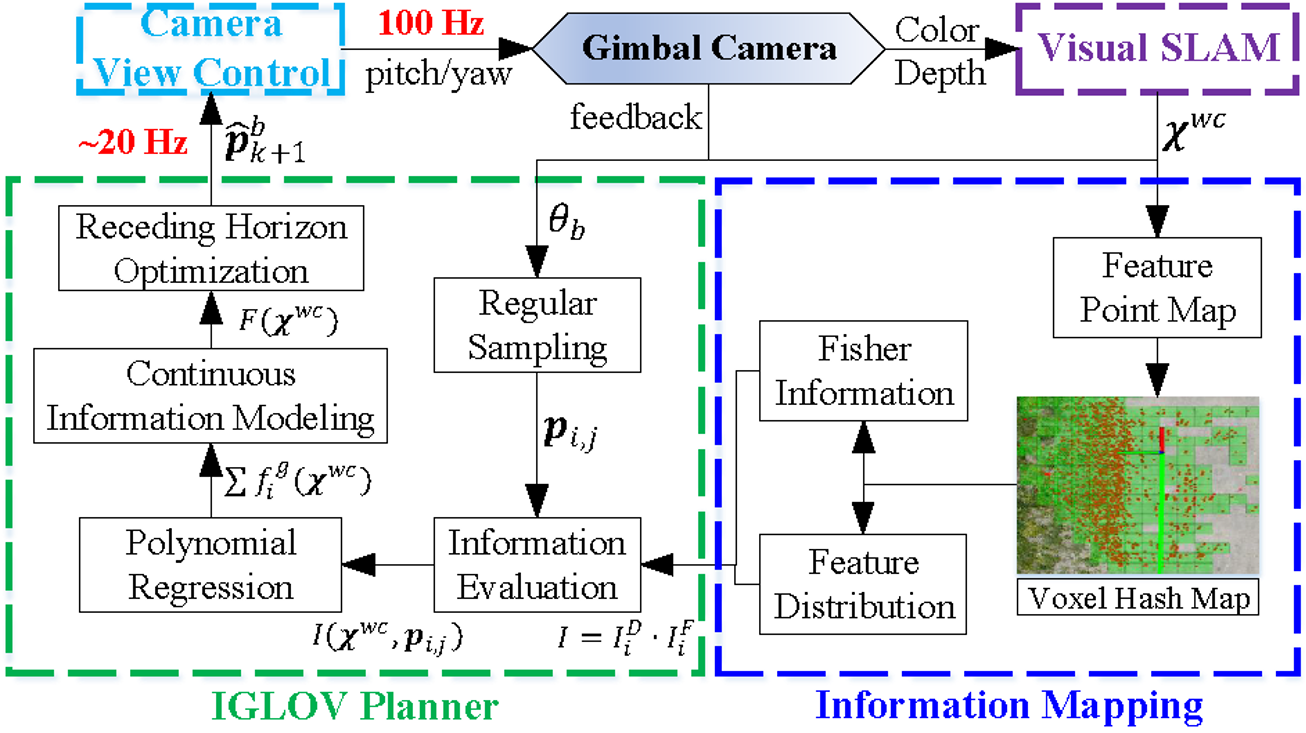
图1 主动视觉定位技术框架图

图2. 主动视觉定位实验效果图
Zhihao Wang, Haoyao Chen, Shiwu Zhang, Yunjiang Lou, “Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling”, IEEE Transactions on Mechatronics, accepted, 2023.