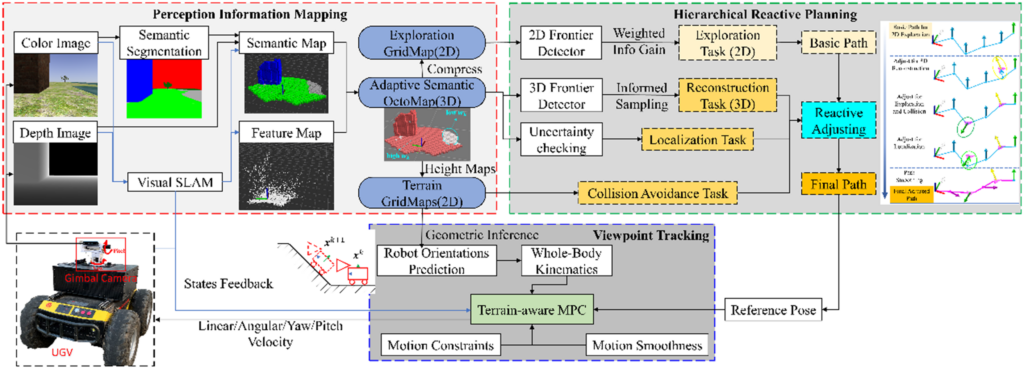
【图/文 王志濠】该工作面向移动机器人的快速自主重建任务,针对野外环境存在空旷、纹理分布不均且地形崎岖等严重影响机器人自主重建效率和鲁棒性的问题,利用主动云台和多层地图信息规划机器人及相机的运动,实现了一种高效且鲁棒的自主重建方案。该方案主要包括以下研究内容:1、基于多层地图的环境交互式探索规划方法,多层地图和交互式规划方法都可以提高信息利用率,从而提高环境探索效率;2、提出地形自适应MPC,通过在MPC中加入感知到的地形信息,用于保证崎岖视角跟踪的稳定性;3、语义-特征融合的自适应定位不确定性表征,用于评估环境中纹理是否会造成定位失效,从而使机器人避开那些无纹理的区域,保证SLAM及自主重建的鲁棒性。相比现有方案,该方案通过多层地图提高了机器人在户外环境下自主重建的效率,并通过感知数据分析及建图技术解决了崎岖地形及复杂纹理环境自主定位失效的问题,从而提高了自主探索的鲁棒性。与国际同类算法相比,户外环境的重建效率提高了50%,目标区域重建成功率提高40%。相关研究成果于2022年发表在机器人顶会IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),并被2023年Journal of Field Robotics (JFR)接收,2024年作为最新的一期封面论文见刊。
代码开源地址为:https://github.com/HITSZ-NRSL/Open3DExplorer
Zhihao Wang, Haoyao Chen*, Mengmeng Fu. “Whole-Body Motion Planning and Tracking of a Mobile Robot with a Gimbal RGB-D Camera for Outdoor 3D Exploration”, Journal of Field Robotics, 41(3), 2024:604-623.