【图/文 贺睿】 本工作面向通用机 械臂的六自由度抓取位姿检测任务,针对当前基于点云的抓取位姿检测算法中存在的…
Read more月度归档: 2024 年 3 月
祝贺NROS-Lab2023届硕士欧阳俊源同学获得哈尔滨工业大学优秀硕士毕业论文
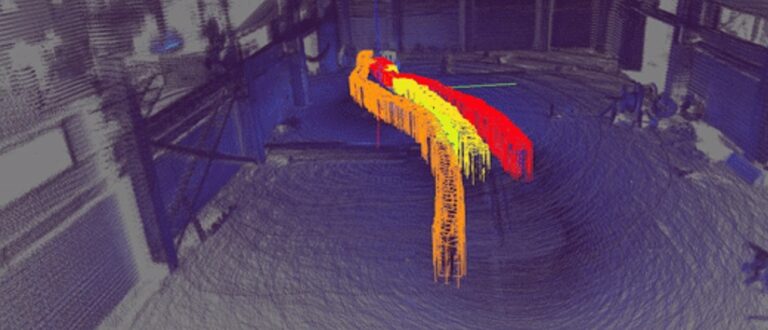
论文题目: 面向灾害救援机器人的实时三维目标检测。主要的贡献点: 针对点云学习模型中二次复杂度的下采样与近邻查…
Read more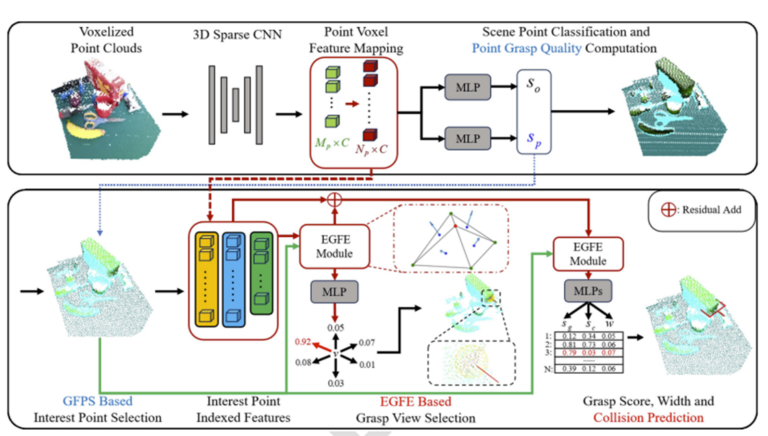
【图/文 贺睿】 本工作面向通用机 械臂的六自由度抓取位姿检测任务,针对当前基于点云的抓取位姿检测算法中存在的…
Read more
论文题目: 面向灾害救援机器人的实时三维目标检测。主要的贡献点: 针对点云学习模型中二次复杂度的下采样与近邻查…
Read more