实验室负责人在智能救援机器人领域的研究基础被认可,获得深圳市优秀科技创新人才杰出青年基金项目资助…
Read more月度归档: 2024 年 8 月
RA-L 2024: Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
【图/文 刘培焱】 本文旨在实现OMAV在杂乱环境中的安全飞行。我们提出了一种3阶段轨迹生成框架(图1),为O…
Read more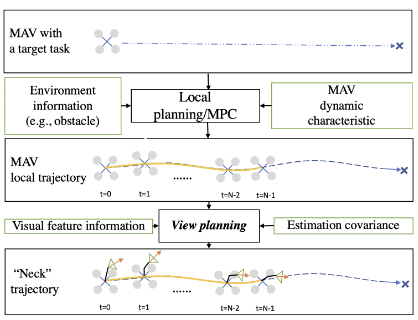
T-AES 2024: A Covariance-based View Planning Algorithm for Aerial Robots with Decoupled Vision System
【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型…
Read more