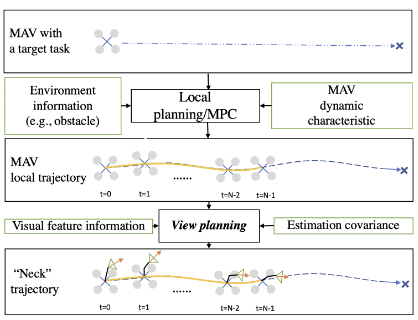
T-AES 2024: A Covariance-based View Planning Algorithm for Aerial Robots with Decoupled Vision System Posted on 2024-08-162024-08-16 【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型… Read more