【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型无人机(MAVs)的视觉里程计精度,可以利用解耦传感器系统(如云台相机)的优势,并根据感知需求主动控制其运动。在本文中,通过精心构建协方差信息、传感器可视性和探索-利用(Exploration-Exploitaion)程度,我们能够建立一个评估视觉里程计鲁棒性的模型,即基于协方差的特征探索-利用(CoFEE)模型。结合CoFEE模型与Time-based RRT采样算法,研究提出了一种主动感知规划算法,使传感器能够主动“看”向视觉特征丰富的场景,从而提升视觉里程计精度。实施这些解决方案可以提高视觉里程计的质量和鲁棒性。我们进行了多项仿真和实验,以验证我们方法的实用性。
本文的主要贡献有三方面:
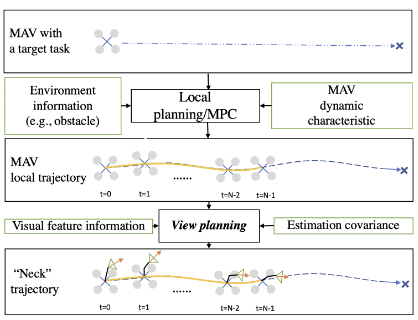
- 我们将主动视角规划问题建模为基于协方差的最优控制问题,旨在最大化未来获取的信息。因此,许多最sota的运动规划算法都可以用来解决这个问题。
- 为了评估视觉里程计的质量,我们提出了CoFEE(Covariance-based Feature Exploration and Exploitation)模型。它评估特征的利用和探索(Exploration-Exploitaion)程度,为视觉里程计的感知质量提供了一个全面的评估和预测,即感知到的特征如何影响视觉里程计的精度和鲁棒性。
- 基于CoFEE,我们开发了一种基于采样的规划算法,通过主动控制相机姿态以增强视觉里程计的感知质量。这种方法在探索未知环境与充分利用已知特征之间取得了平衡。
论文:Hua, B. Xu, F. Quan, J. Sun and H. Chen, “A Covariance-Based View Planning Algorithm for Aerial Robots With Decoupled Vision System,” in IEEE Transactions on Aerospace and Electronic Systems, doi: 10.1109/TAES.2024.3431513.