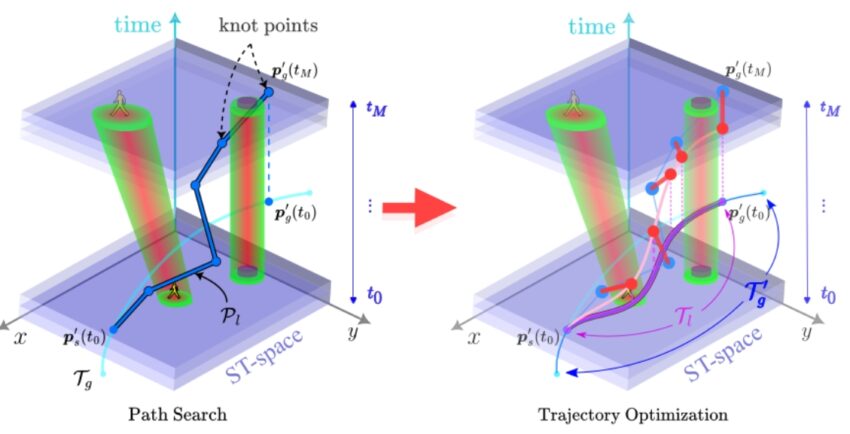
【图/文 全凤宇】多旋翼无人机(MAV)在狭小且不断变化的室内环境中,需要可靠的规划能力以避开移动中的行人。 目前的MAV轨迹规划算法常常导致成功率低下或对可导航空间不必要的限制。 我们提出了一种多阶段的局部轨迹规划方法,该方法利用基于欧几里得有符号距离场(ESDF)的状态-时间空间(ST-space)预测行人移动,以应对这些挑战。 我们的方法通过整合时空优化和快速的ESDF查询,迅速生成无碰撞轨迹。 基于统计分析,我们的方法在行人速度增加时,性能优于现有的最先进的MAV轨迹规划方法。 最后,我们验证了我们提出的方法在室内动态场景中的实时适用性。
本工作的主要贡献: 我们工作贡献是设计了一个多阶段的局部轨迹重新规划框架,该框架结合了基于实时欧几里得有符号距离场(ESDF)的状态-时间空间(ST-space)构建与时空耦合优化。 这种方法显著提高了在动态障碍物避让中的成功率和无人机(MAV)的飞行效率和绕行成功率,特别是在相对高速的运动行人场景中。
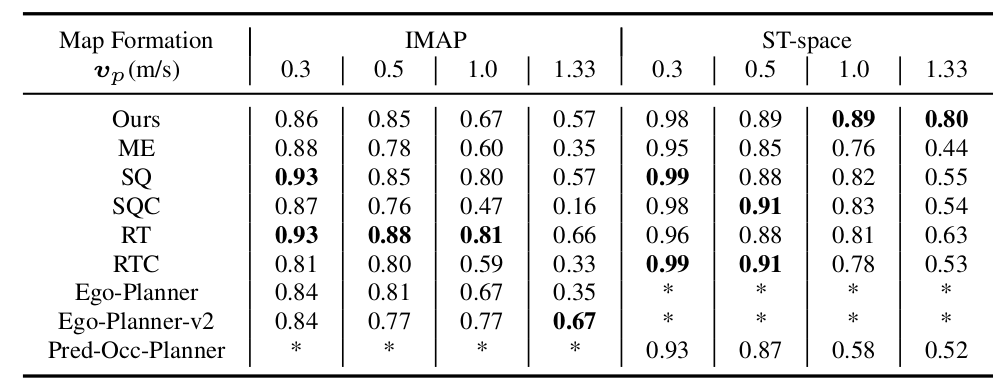
从上表中可以看到我们的方法尤其在运动行人速度较快时,可以获得更高的绕行成功率。
论文: F. Quan, Y. Shen, P. Liu, X. Lyu and H. Chen, “A State-Time Space Approach for Local Trajectory Replanning of an MAV in Dynamic Indoor Environments,” in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2025.3541376.