

【图/文 邢立 王思强】2023年12月30日,机电学院年度羽毛球赛如火如荼展开,NROS-lab实验室的小伙…
Read more
封面论文JFR 2024: Whole-Body Motion Planning and Tracking of a Mobile Robot with a Gimbal RGB-D Camera for Outdoor 3D Exploration
【图/文 王志濠】该工作面向移动机器人的快速自主重建任务,针对野外环境存在空旷、纹理分布不均且地形崎岖等严重影…
Read moreAutomatica2023: Adaptive Trajectory Tracking of UAV with a Cable-Suspended Load Using Vision-Inertial-Based Estimation
【图/文 王思强】该工作面向无人机携带悬挂载荷的负载运输需求,设计了一种结合自适应状态估计器和轨迹跟踪控制器的…
Read more
[RA-L2023] Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization
【图/文 闫栋宇、刘健恒】在该工作中,我们创新性地将神经隐式三维表达与主动重建进行了有机结合,提出了一种基于最…
Read more
祝贺实验室负责人获得哈深机电学院优秀教学教师荣誉
2023年6月10日,哈尔滨工业大学(深圳)机电工程与自动化学院2023年表彰大会于师生活动中心如期召开。 深…
Read more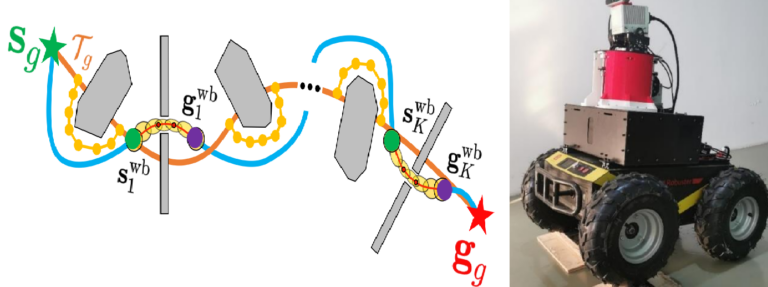
祝贺NROS-Lab2023届本科生梁思奇同学获得哈尔滨工业大学优秀本科毕业论文、李鸣航同学获得提名奖
梁思奇本科毕业论文题目: 基于激光雷达和多分辨率搜索的无人机自主避障与路径规划 贡献点: 设计了多分辨率并行路…
Read more
祝贺NROS-Lab2023届硕士刘健恒同学获得哈尔滨工业大学优秀硕士毕业生
刘健恒同学自入学以来认真学习,学习成绩优异,积极参加文体活动,保证德智体美劳的全面发展。生活中与人为善,乐于助…
Read more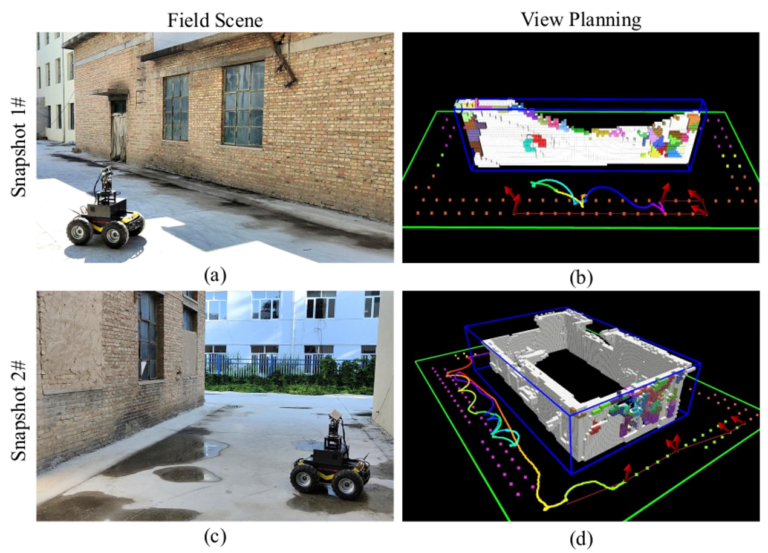
TIM2023: Object-Aware View Planning for Autonomous 3D Model Reconstruction of Buildings Using a Mobile Robot
【图/文 李宇翔】代码开源地址为:https://github.com/HITSZ-NRSL/active_m…
Read more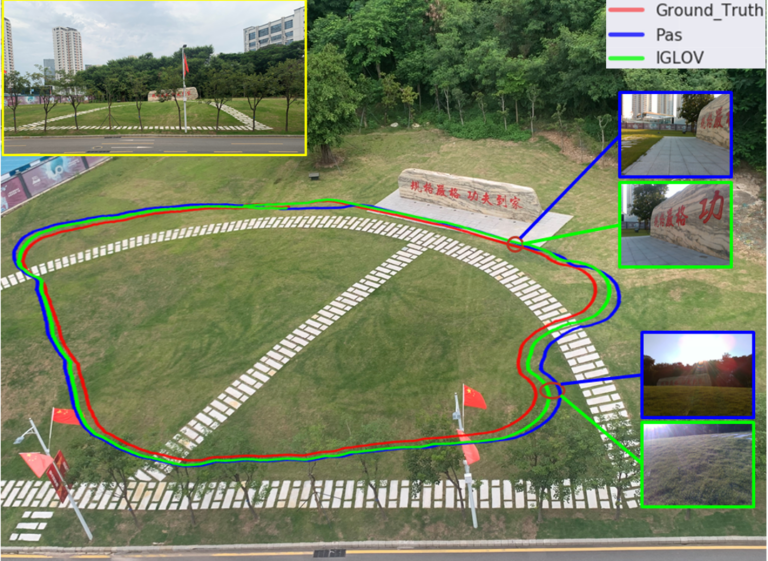
TMECH2024: Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling
【图/文 王志濠】该工作面向野外机器人作业过程中的自主定位需求,针对野外环境下地形崎岖以及纹理分布不均等严…
Read more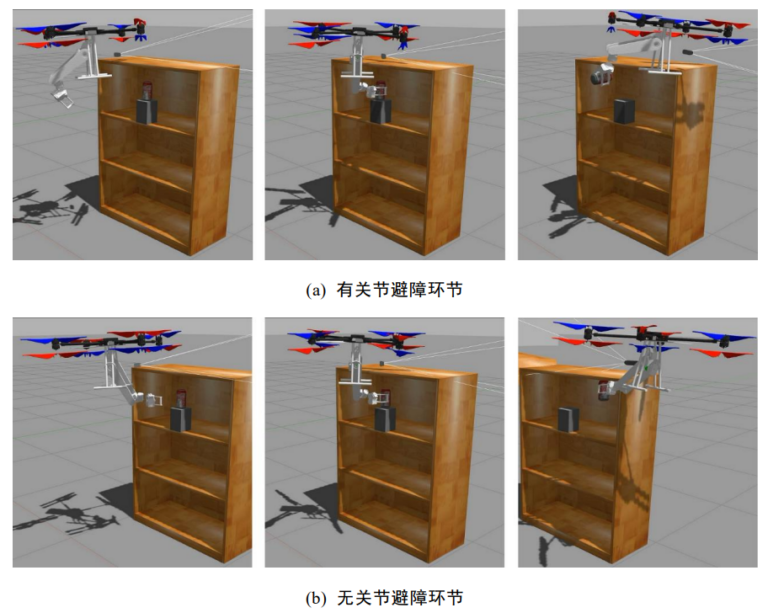
祝贺NROS-Lab2022届硕士王巨同学获得哈尔滨工业大学优秀硕士学位论文
经过激烈的竞争,NROS实验室2020级硕士(2022届毕业)王巨同学凭借其毕业论文《障碍空间下…
Read more