
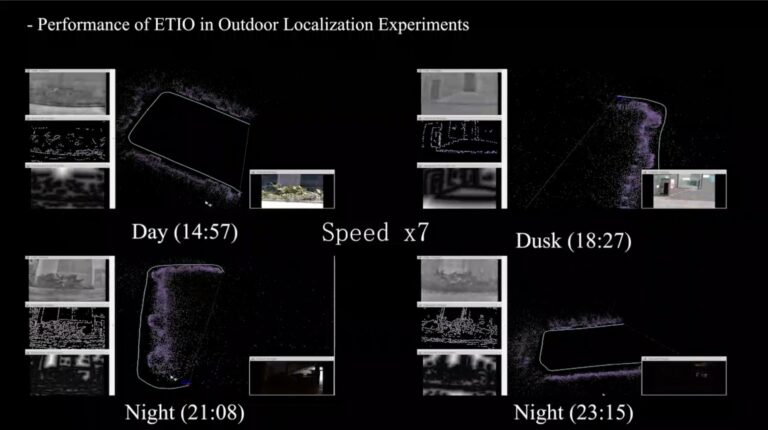
【图/文 王煜】针对可见光相机在灾害救援场景中容易出现的视觉退化问题,项目组提出了世界上首个基于边缘信息的红外…
Read more
赛出青春,挑战自我:祝贺NROS-lab队夺得2022“自动化杯”羽毛球赛亚军,取得新的突破
【文/图 邢立】一年一度的哈工大(深圳)自动化杯羽毛球赛,于12月10号举行。来自控制专业的选手,按照课题组分…
Read more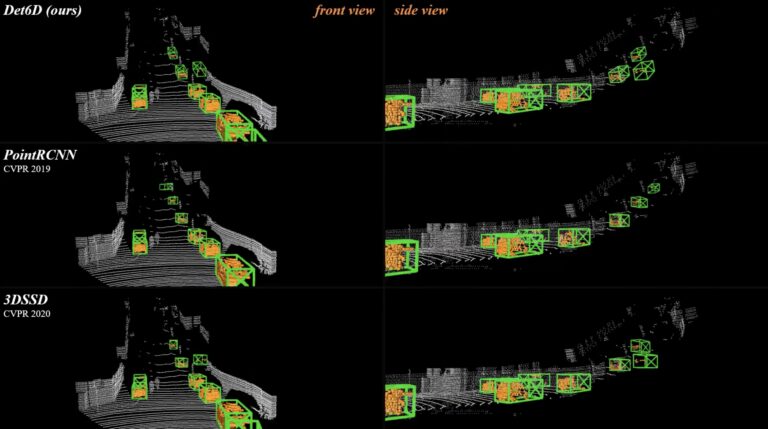
TIM2022:NROS-Lab releases the source code of Det6D, a full-degree-of-freedom 3D object detector
[图文欧阳俊源] NROSLab has recently made public its latest re…
Read more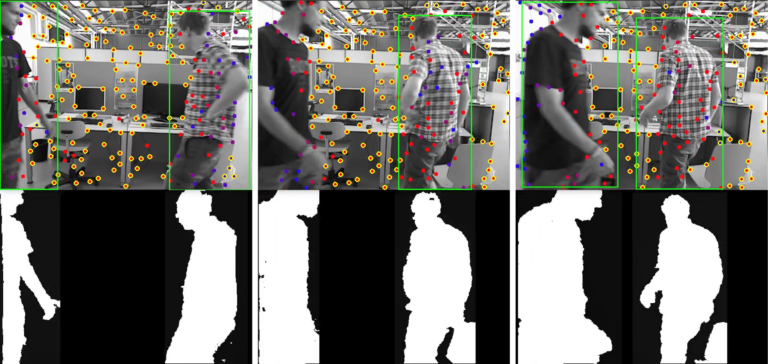
RAL2022:nROS-Lab开放视觉惯性里程计Dynamic-VINS源码
【图文 刘健恒】nROS-Lab近期开放与华为合作的最新成果Dynamic-VINS,期待感兴趣的研究与开发人…
Read more
祝贺实验室负责人获得机电学院“优秀导师”称号
实验室负责人在2022年机电工程与自动化学院教学活动中荣获“优秀导师奖”。
Read more
祝贺2022届本科生刘越千同学获得校本科优秀毕业论文
题目:过驱动六旋翼无人机的自适应模型预测控制 摘要: 在需要与环境有物理交互的场景下,过驱动无人机由于可以在…
Read more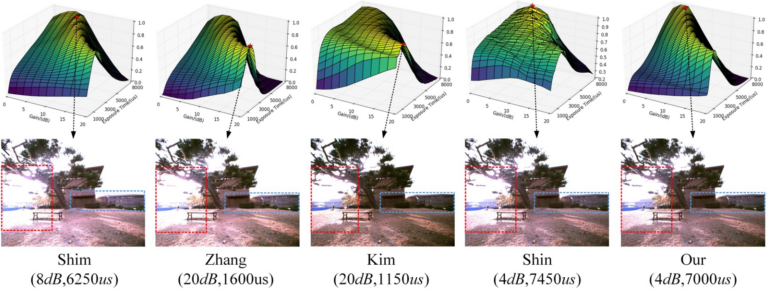
Autonomous Robots:nROS-Lab开源面向SLAM的主动曝光控制算法
【图文 王煜】Recently, our work “Automated Camera-Exposure C…
Read more祝贺nROS-Lab2021届硕士毕业生曹明同学获得哈工大优秀毕业论文、朱西同学获得哈工大优秀毕业生
经过激烈的竞争,nROS实验室2021届硕士毕业生曹明和朱西同学获得哈尔滨工业大学优秀毕业生荣誉,曹明同学还凭…
Read more
祝贺nROS-Lab与中科大智能机器人实验室联合获得国家自然科学基金区域联合创新基金资助
此次联合申请国家自然科学基金区域联合创新基金,是nROS-Lab与中国科学技术大学智能机器人实验室张世武教授团…
Read more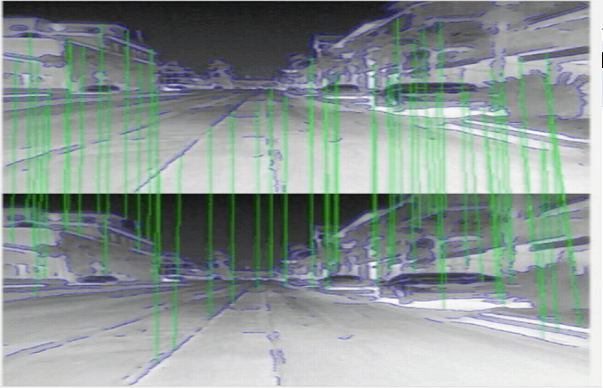
JFR 2021:EIL-SLAM: Depth-enhanced Edge-based Infrared-LiDAR SLAM
Title:EIL-SLAM: Depth-enhanced Edge-based Infrared-LiDA…
Read more